Classificação dos Sistemas Lineares — SPD, SPI e SI
Critérios práticos com determinante (caso quadrado), posto (rank) e matriz aumentada. Interpretação geométrica e relação entre número de equações e incógnitas.

Sistema possível determinado (SPD)
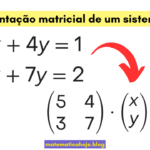
Um sistema é SPD quando possui exatamente uma solução. Em termos matriciais, com \(A\in\mathbb{R}^{m\times n}\) e sistema \(A\mathbf{x}=\mathbf{b}\), isso ocorre quando:
- \(\operatorname{rg}(A)=\operatorname{rg}([A\,|\,\mathbf{b}])=n\) (todas as variáveis ficam determinadas), e
- necessariamente \(m\ge n\). No caso quadrado \(n\times n\), equivale a \(\det(A)\ne 0\).
Importante: o critério do determinante aplica-se apenas a sistemas quadrados \(n\times n\). Para sistemas retangulares, utilize o posto (rank) e a igualdade \( \operatorname{rg}(A)=\operatorname{rg}([A\,|\,\mathbf{b}])=n \).
Pratique este caso com exercícios 2×2 e 3×3 no Guia de Métodos. Veja também Definições e Conceitos.
Sistema possível indeterminado (SPI)
Um sistema é SPI quando é compatível e possui infinitas soluções. Em linguagem de posto (rank):
- \(\operatorname{rg}(A)=\operatorname{rg}([A\,|\,\mathbf{b}])=r\), mas
- \(r
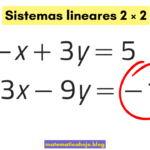
Geometria (2 variáveis): duas retas coincidentes (mesmo conjunto de pontos). Para revisar a escrita matricial e matriz aumentada, veja Definições e Conceitos.
Pratique com exercícios no Guia de Métodos.
Sistema impossível (SI)
Um sistema é SI quando é incompatível, ou seja, não admite solução. Em termos de posto:
Geometria (2 variáveis): duas retas paralelas que não se encontram. Em dimensões maiores: em \(\mathbb{R}^n\), pense em hiperplanos; SI ocorre quando não há ponto comum entre eles. Veja Definições e Conceitos.
Pratique com exercícios no Guia de Métodos.
Critério baseado na relação entre número de equações e incógnitas
Considere \(A\in\mathbb{R}^{m\times n}\), com sistema \(A\mathbf{x}=\mathbf{b}\), posto \(r=\operatorname{rg}(A)\) e \(r'=\operatorname{rg}([A\,|\,\mathbf{b}])\).
Casos típicos
- Sistema quadrado (\(m=n\)):
— Se \(\det(A)\ne0\) ⇒ \(r=r'=n\) ⇒ SPD.
— Se \(\det(A)=0\), pode ser SPI (se \(r=r'
- Mais equações do que incógnitas (\(m>n\), superdeterminado): — Pode ser SPD se \(r=r'=n\). — Pode ser SI se algum subconjunto for incompatível (\(r\ne r'\)).
- Mais incógnitas do que equações (\(m
Resumo via Rouché–Capelli
Essas relações explicam por que alguns sistemas têm solução única, outros infinitas e outros nenhuma. Veja um exemplo curto de escalonamento e contagem de posto:
Exemplo rápido: posto e classificação
Tabela-resumo: SPD × SPI × SI
| Classificação | Condição (posto) | Nº de soluções | Geometria (2D) |
|---|---|---|---|
| SPD | \(r=r'=n\) | Única | Retas secantes (1 ponto) |
| SPI | \(r=r'| Infinitas (\(n-r\) parâmetros) |
Retas coincidentes |
|
| SI | \(r\neq r'\) | Nenhuma | Retas paralelas distintas |
Para ver como o posto aparece no escalonamento, confira Escalonamento de Gauss.
FAQ — Perguntas frequentes
Como saber rapidamente se um sistema 2×2 é SPD?
Se for quadrado, calcule o determinante \(\Delta=a_1b_2-a_2b_1\). Se \(\Delta\neq0\), o sistema é SPD.
Se \(m
Não. Com menos equações do que incógnitas, se o sistema for compatível, será SPI (haverá parâmetros livres). Pode ser SI se incompatível.
O que é a matriz aumentada e por que ela importa?
É \([A\,|\,\mathbf{b}]\), matriz dos coeficientes com a coluna dos termos independentes. Comparar \( \operatorname{rg}(A) \) e \( \operatorname{rg}([A|b]) \) (Rouché–Capelli) decide compatibilidade.
Em dimensões maiores, como interpretar SPI?
Como interseção de hiperplanos formando um conjunto afim de dimensão \(n-r\) (reta, plano, etc.).
Não. Com menos equações do que incógnitas, se o sistema for compatível, será SPI (haverá parâmetros livres). Pode ser SI se incompatível.
O que é a matriz aumentada e por que ela importa?
É \([A\,|\,\mathbf{b}]\), matriz dos coeficientes com a coluna dos termos independentes. Comparar \( \operatorname{rg}(A) \) e \( \operatorname{rg}([A|b]) \) (Rouché–Capelli) decide compatibilidade.
Em dimensões maiores, como interpretar SPI?
Como interseção de hiperplanos formando um conjunto afim de dimensão \(n-r\) (reta, plano, etc.).
Produtos do Blog
Materiais para acelerar seus estudos de Matemática — mapas mentais, e-books, questões comentadas e muito mais: